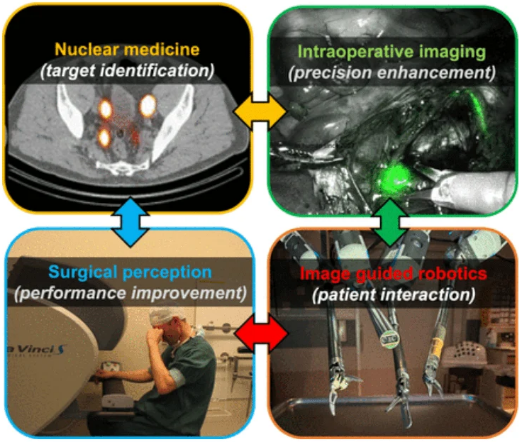
图像引导手术(IGR)领域正在不断发展,重点关注通过使用药物和放射性药物来提高目标清晰度。这些物质,也称为示踪剂,有助于突出特定的解剖学或疾病相关特征,从而增强外科医生将目标组织与其周围环境区分开来的能力。随着20世纪90年代末的放射免疫引导手术概念的出现,又结合了受体靶向和基于生理学的方法,这些示踪剂的开发和应用现已得到显著扩展。最近发表在《Journal of Nuclear Medicine》上的一篇文章探讨了在手术指导中使用药物和放射性药物的进展、挑战和未来方向。
放射性药物:提高手术精度
放射性药物在IGR中起着至关重要的作用,特别是在放射引导手术中,它能够精准地确定目标位置。在微剂量方案(≤100μg/患者)中应用放射性药物有助于将其从临床前研究转化为临床环境。核医学的研究表明,剂量是影响成像数据质量的关键因素。较高剂量会导致受体过饱和,对信噪比产生负面影响,并增加假阳性的风险。
一对典型的示踪剂,用于诊断的68Ga-/18F-PSMA和用于手术放射性示踪的99mTc-/111In PSMA,展示了放射性药物优化如何提高手术精度。68Ga-/18F-PSMA PET上的SUVmax与手术期间的99mTc PSMA信号强度相关,确保准确识别病变而不会过饱和。这些进展强调了优化克分子浓度和特定活动以实现相关术前和术中准确性的重要性。
荧光示踪剂的集成
荧光示踪剂虽然前景广阔,但由于其检测灵敏度低于放射性药物,因此面临着转化挑战。通常需要治疗性给药方案来弥补这一点,这可能会导致受体过饱和和信噪比欠佳。然而,在克服这些局限性方面正在取得进展,特别是在受体靶向应用方面。
混合示踪剂结合了放射性和荧光成分,是一种有前景的策略。这些示踪剂可以直接将术中的荧光结果与术前成像联系起来,从而增强外科医生可视化和准确定位病变的能力。整合这种混合示踪剂可以显著改善术前和术中发现之间的相关性,为手术指导提供更全面的方法。
手术机器人中的感知增强模式
在手术机器人中整合感知增强模式对于改善外科医生与患者的互动至关重要。内窥镜视觉,特别是通过提供3D视频流的系统集成内窥镜,一直是手术机器人成功的基础。这些内窥镜配备了荧光成像功能,有助于实时识别目标组织,提高手术精度。
感官技术的最新进展进一步丰富了外科医生在手术过程中的感知能力。例如,最新的达芬奇平台集成了触觉反馈,使外科医生能够通过机器人仪器感知组织刚度和其他特征。此外,插入式超声波、γ、β和光纤共聚焦探头以及第二代卡入式传感器能够实现超越人类感官极限的分子传感能力。
数字化和数据集成
手术机器人在整合和数字化多感官数据流方面具有独特的优势,可将其转换为数字手术平台。这种能力允许吸收和多路复用各种数据输入,包括患者病史、麻醉学和物流,这些数据可以转化为手术团队的可操作输出。当与智能算法结合使用时,可以处理这些数据流,以提供前所未有的复杂性和洞察力。
这种集成的一个实际应用是将术前获取的成像路线图与手术视频源一起分屏可视化。这种方法有助于将静态诊断图像与动态手术环境相关联。增强现实和混合现实可视化通过将术前图像叠加到手术视频源上,进一步增强了这种相关性,从而促进类似GPS的方向引导。这种数据流的集成有助于提高手术过程中的导航精度和决策。
在图像引导外科手术中使用药物和放射性药物来确定目标已经彻底改变了该领域,提高了外科手术的精度和有效性。放射性药物已被证明在实现准确的病变识别方面至关重要,而荧光示踪剂和混合示踪剂的进步有望进一步改善术中指导。在手术机器人中集成增强感知模式并将数据流数字化,为推进外科医生与患者的互动提供了重要机会。随着该领域的不断发展,这些创新可能会扩大核医学和分子成像对患者护理的影响,为更精确、有效和个性化的手术干预铺平道路。